Телеконтроль и телеуправление в энергосистемах - Погрешности телеизмерения
- Телеконтроль и телеуправление в энергосистемах
- Введение
- Функции систем телемеханики
- Типовые структуры систем ТМ
- Структурная схема и основные функциональные блоки системы ТМ
- Структура диспетчерского управления
- Система сбора и передачи оперативных данных на высших уровнях диспетчерского управления
- СПОД на уровне ЦДУ ЕЭС
- СПОД в энергосистемах
- Многоуровневая телеинформационно-управляющая система
- Автоматизированная система АСДУ РС
- Телемеханические сообщения и обслуживание случайных процессов
- Методы передачи оперативной информации в телеинформационных системах АСДУ
- Погрешности телеизмерения
- Погрешность передачи телеизмерений в многоуровневых системах
- Информация и управление
- Структурные характеристики дискретных сигналов
- Основные характеристики кодов
- Числовые коды
- Сменно-качественные коды
- Коды с обнаружением и исправлением ошибок
- Коды Хэмминга
- Повышение эффективности кодирования использованием коррелированности сообщений
- Передача сообщений в телемеханических системах
- Кодовые форматы с постоянным и переменным числом информационных кодовых слов
- Кодовый формат протокола HDLC
- Диалоговые процедуры передачи телемеханической информации
- Примеры применения диалоговых процедур
- Микропроцессорные системы телемеханики
- Микропроцессорная адаптивная информационно-управляющая система АИСТ
- Математическое обеспечение, технические данные АИСТ
- Телекомплекс ГРАНИТ
- Устройство КП, конструкция ГРАНИТ
- Управляющий вычислительный телемеханический комплекс УВТК-120
- Программируемые канальные адаптеры
- Система телемеханики GEADAT81GT
- Система телемеханики TRACEC
- Система телемеханики URSATRANS
- Особенности структур систем телемеханики для распределительных сетей
- Комплекс устройств телемеханики МКТ-3
- Система телемеханики ТМРС-10
- Аппаратура тонального канала связи АТКС-10
- Достоверность приема сообщений в телекомплекс ТРС-1
- Телемеханический комплекс КТМ-50
- Система циркулярного телеуправления с обратной телесигнализацией
- Список литературы
Погрешность ТИ характеризует степень несоответствия показаний приемного измерительного прибора действительному значению измеряемой величины.
Согласно ГОСТ 26.205—83* устанавливаются классы точности каналов ТИ для устройств и комплексов при цифровом и аналоговом воспроизведении телеизмеряемых параметров из следующего ряда: 0,15; 0,25; 0,4; 0,6; 1,0; 1,5; 2,5.
Общие показатели погрешностиПогрешность канала ТИ характеризуется абсолютной погрешностью , относительной погрешностью % и приведенной погрешностью ' %: ![]() где А„ — показания приемного прибора ТИ; А — действительное значение измеряемой величины, определяемое по показаниям образцового прибора; Aшк - диапазон шкалы измерений.
где А„ — показания приемного прибора ТИ; А — действительное значение измеряемой величины, определяемое по показаниям образцового прибора; Aшк - диапазон шкалы измерений.
Класс точности канала ТИ определяется относительной приведенной погрешностью при номинальных условиях работы всех составляющих системы телеизмерения: ’ % при этих условиях не должно превышать значения соответствующего класса. Влияние внешних факторов на работу системы ТИ характеризуется так называемой дополнительной погрешностью. В отличие от основной погрешности, которая определяется при номинальных условиях, дополнительная погрешность связана с изменением рабочих условий — температуры и влажности окружающей среды, напряжений и частоты источников питания и т. п. Дополнительные погрешности указываются в виде приведенных погрешностей, отнесенных к единице или диапазону изменения параметра, вызывающего дополнительную погрешность. Эти погрешности могут быть соизмеримы с основными, но согласно ГОСТ 26.205—83* не должны их превышать при отклонении напряжения питания на +10 и —15% номинального значения, частоты — от 48 до 51 Гц, напряжения входного сигнала приемника - не менее чем в 2 раза (за исключением устройств интенсивности) и т. д. Допустимые пределы изменения внешних условий указываются в технических условиях на изделие, причем испытание на соответствие оговоренному классу точности должно производиться при изменении каждого внешнего параметра в отдельности (например, только либо напряжения, либо частоты питания приемника, либо температуры и т. п.).
Составляющие погрешности.В системах ТИ измеряемый параметр подвергается многочисленным преобразованиям, причем каждый узел (аппарат) преобразования вносит свою составляющую погрешности.
Основные составляющие погрешности:
погрешность трансформаторов тока и напряжения ;
погрешность первичного преобразователя (датчика) д, погрешность передающего устройства ТИ, преобразующего сигнал датчика в сигнал, поступающий в канал связи, пд;
погрешность канала свяи, включая погрешности преобразования сигналов в канале связи и от действия помех, к.с;
погрешность приемного устройства ТИ, преобразующего сигнал из канала связи в сигнал, поступающий в устройство обработки, ;
погрешность преобразования в устройстве обработки (масштабирование, усреднение и т. .) 6;
погрешность указывающего (измерительного) прибора и.п.
Если принять составляющие погрешности взаимонезависимыми случайными величинами, то суммарная среднеквадратичная погрешности ТИ представляется следующим образом:
![]() (2-7)
(2-7)
Принципы построения телеизмерительных систем и используемые ими методы преобразования сигналов определяют так называемую погрешность телепередачи , которая является характеристикой собственно телеизмерительной системы (независимо от первичных преобразователей и устройств отображения ТИ):
![]() (2.8)
(2.8)
Заводы-изготовители телемеханической аппаратуры оценивают класс точности ТИ по погрешности тп, поскольку они не отвечают за точность датчиков, трансформаторов тока и устройств отображения и т. п. Однако для пользователя, естественно, более ценна общая оценка точности ТИ (2.7). Проблема точности ТИ на диспетчерских пунктах в целом усугубляется, кроме того, и тем, что первичные преобразователи на энергообъектах, имеющие различные погрешности, опрашиваются не одновременно, т. е. появляется дополнительная погрешность от разновременности съема показаний ТИ-параметров. Сюда же следует отнести погрешности, связанные с ретрансляцией телеизмерений в многоуровневых телеинформационных системах. Поэтому реальная погрешность ТИ различных параметров на диспетчерском пункте может существенно отличаться от , гарантированной заводом-изготовителем.
Для повышения точности ведения режима энергосистем по данным телеизмерений следует использовать все доступные методы ограничения и коррекции составляющих погрешностей ТИ. Для этого прежде всего необходимо:
периодически контролировать точность первичных преобразователей, включая проверки измерительных трансформаторов и датчиков;
контролировать погрешности, вносимые ретрансляцией ТИ, и добиваться ее минимизации путем уменьшения числа преобразований сигнала;
выявлять ’’грубые” ошибки ТИ, являющиеся следствием импульсных помех в каналах связи, и не выдавать их на вход устройств отображения и в ретранслирующее устройство;
передавать замеры ТИ на разных энергообъектах с ’’меткой времени”, с тем чтобы на ДП приводить все измерения к ’’единому времени”.
Кроме того, в современных ОИК широко используются методы оценки состояний, позволяющие рассчитывать параметры контролируемых режимов энергосистем по отдельным, в том числе и недостаточно точным, ТИ [26, 27].
Погрешность телепередачи в кодоимпульсных системах телеизмеренийВо всех современных телеинформационных комплексах для энергосистем применяется кодоимпульсный метод телеизмерений, обеспечивающий:
высокую помехозащищенность телепередачи благодаря применению помехозащищенных кодов;
возможность получения высокой точности ТИ;
отсутствие дополнительной погрешности при ретрансляции телеизмерений по методу код—код;
возможность построения комплексных кодоимпульсных устройств ТИ—ТС;
удобство цифрового воспроизведения и сопряжения с ЭВМ.
В передатчике ТИ кодоимпульсной системы осуществляется преобразование аналоговых измеряемых величин, поступающих от датчика, в кодированные сигналы. При этом непрерывный сигнал у(t) подвергается квантованию по уровню с шагом h и дискретизации по времени с шагом дискретизации То (рис. 2.2) .
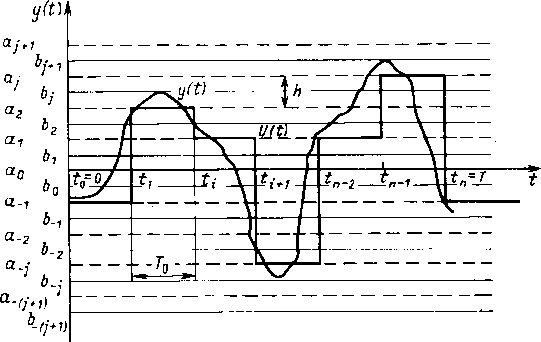
Рис. 2.2. Квантование функции у (t) по уровню и дискретизация по времени: aj - Уровни квантования; h - шаг квантования; b- - пороги квантования, / = 0, ± 1, ± 2, . . .; tn - моменты дискретизации по времени; То - шаг дискретизации
В результате этого преобразования непрерывный сигнал заменяется (аппроксимируется) дискретным сигналом U(t). При аппроксимации возникает ошибка (погрешность), которая может быть представлена двумя составляющими:
погрешностью квантования по уровню — статической .ошибкой; погрешностью дискретизации по времени - динамической ошибкой. Погрешность аппроксимации в основном определяет погрешность передатчика кодоимпульсной системы.
Определим СКО аппроксимации аналого-цифрового преобразования в циклических кодоимпульсных системах с постоянным циклом замера То мгновенных значений измеряемых параметров. При этом предполагается, что все узлы схемы АЦП (орган сравнения, эталоны резисторов) обеспечивают фиксацию уровней квантования с точностью до половины шага квантования.
а) Погрешность квантования по уровню является случайной величиной ек, равной разности между фактическим значением величины в момент замера у(t) и ближайшим уровнем квантования at.. Максимальное значение статической ошибки квантования,![]()
Среднеквадратичное значение этой ошибки ек.ск находится из выражения
![]()
Рис. 2.3. Равномерное распределение погрешности квантования ек в пределах шага квантования h
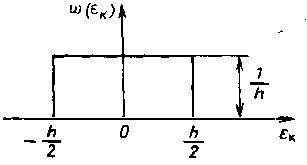
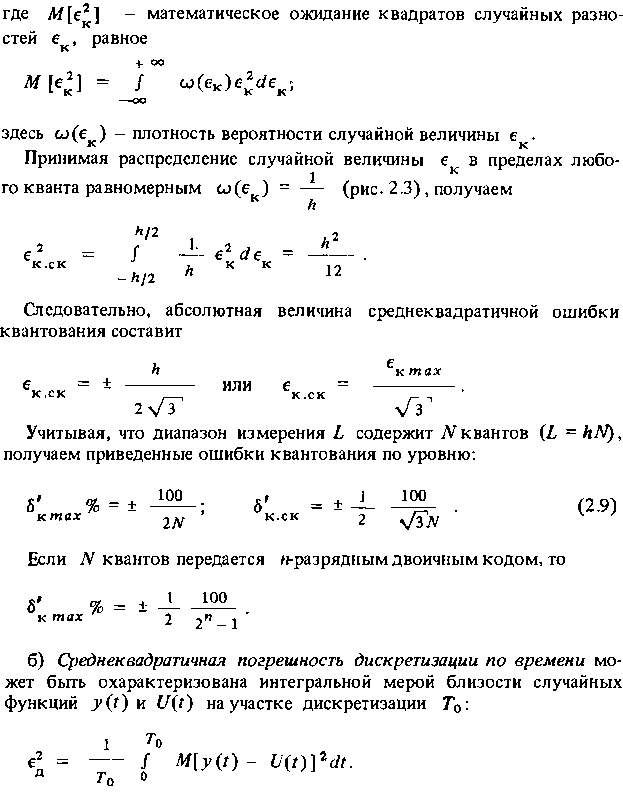
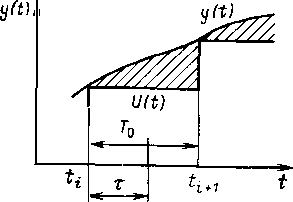
Рис. 2.4. К определению СКО дискретизации по времени
Величина е численно равна среднему значению квадратов случайных площадей, ограниченных функциями у(t) и U(t) на участке дискретизации (заштрихованная площадь на рис. 2.4).
Полагая случайный процесс y(t) стационарным коррелированным процессом с нулевым средним, получим
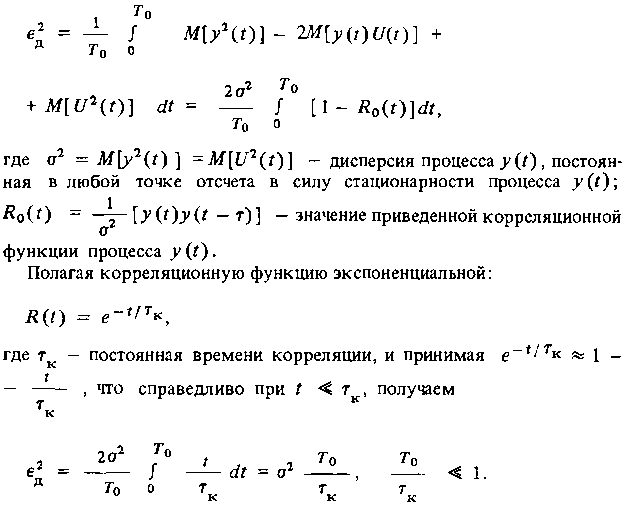
Таким образом, при принятых допущениях абсолютная среднеквадратичная погрешность дискретизации по времени определяется следующим выражением:
![]()
Соответственно приведенное значение этой погрешности
![]() (2.10)
(2.10)
Суммарная приведенная СКО аппроксимации в передающем устройстве кодоимпульсной системы ТИ в предположении, что и — независимые случайные величины, составит
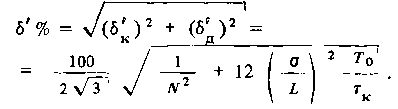 (2-11)
(2-11)
Погрешность квантования по уровню характеризует статическую погрешность, в то время как погрешность дискретизации связана с изменением контролируемого параметра во времени, т. е. является динамической погрешностью. Введем понятие средней частоты изменения параметра , равное средней частоте пересечения случайным процессом у(t) границ порога квантования h . (В терминах теории массового обслуживания величина является интенсивностью заявок на обслуживание.) Для гауссового случайного экспоненциально-коррелированного процесса при условии![]() можно показать, что средняя частота заявок, 1/с, составляет [29]
можно показать, что средняя частота заявок, 1/с, составляет [29]
![]() (2.12)
(2.12)
Подставляя в (2.11) величину (2.12), получаем следующее выражение для СКО аппроксимации:
![]() (2.13)
(2.13)
Для быстро меняющихся параметров (у которых значение достаточно велико) динамическая составляемая погрешности может быть достаточно велика и нередко боле значительна, чем статическая погрешность.
В табл. 2.1 приведены экспериментальные данные, полученные в результате статистической обработки данных ТИ-параметров в энергосистемах [27]. В той же таблице приводятся значения СКО аппроксимации и соотношение между динамической и статической составляющими погрешности, подсчитанные по (2.9) —(2.11) при использовании кодоимпульсных устройств телемеханики двух типов: МКТ-2 (с циклом обновления То = 9,24 с) и ТМ-512 (То = 12,16 с).
Таблица 2.1. Экспериментальные данные к расчету динамической составляющей СКО
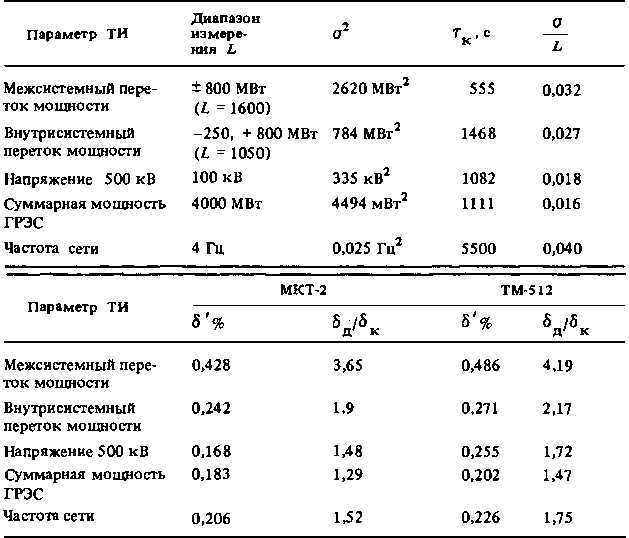
Расчетная скорость передачи в обоих случаях составляет 50 Бод, расчетное число каналов 32,число уровней квантования N=256.
В соответствии с данными табл. 2.1 динамическая составляющая СКО может значительно превосходить статическую составляющую. Так, при измерении межсистемного перетока мощности отношение / составляет 3,65 для МКТ-2 и 4,19 для ТМ-512.
При увеличении скорости передачи динамическая составляющая уменьшается. Однако, как показывают расчеты, даже при скоростях 600 и 1200 Бод динамическая составляющая остается соизмеримой со статической (д/к = 1,0 и при 600 Бод и 0,71 и 0,8 при 1200 Бод для МКТ-2 и ТМ-512 соответственно).
Погрешность аппроксимации с учетом запаздывания и помех при передачеОт момента отсчета параметра ТИ передающим устройством до момента его фиксации приемным устройством проходит определенное время — время запаздывания t3. Наличие запаздывания приводит к увеличению СКО аппроксимации благодаря тому, что значение измеряемого процесса y(t) в момент воспроизведения отсчета может существенно отличаться от замеренного передатчиком отсчета.
Величина t3 включает в себя время задержки (от момента отсчета до момента начала передачи), время передачи кодового слова t0 данного параметра (включая запаздывание в канале связи) и время проверки правильности приема и фиксации отсчета на выходе приемного устройства. В зависимости от методов формирования и фиксации сигналов в системе ТИ и протяженности канала связи значение t3 и соотношение между его составляющими могут быть весьма различными.
Можно достаточно строго доказать [29], что при некоторых допущениях учет времени запаздывания при определении СКО сводится к увеличению длительного интервала дискретизации на величину 2t3.
Помехи в канале связи приводят к искажению принимаемых сигналов. Если искажения обнаруживаются защитой, то принимаемые сообщения бракуются приемником. В циклических системах забракованный параметр ТИ появляется на выходе в приемном устройстве на следующем цикле передачи (если и этот цикл не будет содержать обнаруживаемой ошибки). Если же помеха повредит сообщение и во второй раз, то значение параметра ТИ зафиксируется в приемном устройстве лишь после третьего цикла и т. д. Таким образом, длительность цикла Tц восстановления отсчета на приемной стороне становится случайной. Если через Роб обозначить вероятность обнаруживаемых ошибок при приеме данного параметра ТИ, то Тц принимает значение То с вероятностью (1 — Роб)> значение 2Т0 — с вероятностью Роб (1 — -Роб)···, значение iТ0 — с вероятностью Р (1 — Роб) и т. д. Средняя длительность цикла восстановления Тц равна
Подставив в (2.13) вместо Тц его среднее значение (2.14), получим CKO аппроксимации с учетом действия помех:
![]()
Если к тому же учесть время запаздывания t3, то окончательно получим СКО телепередачи
 (2.15)
(2.15)
Таким образом, из-за наличия помех, обнаруживаемых приемным устройством, и запаздывания передачи возрастает динамическая, а следовательно, и общая погрешность телепередачи. Не обнаруживаемые же ошибки (с вероятностью Рпож) приводят к ложным показаниям ТИ. Однако при этом следует иметь в виду, что в современных кодоимпульсных системах величина Рпож весьма мала. Поэтому достаточно существенные ошибки показаний ТИ чаще всего являются следствием неисправности действия передатчика либо кодовых защит приемного устройства, а не действия помех в канале связи.
Расчетная погрешность телепередачиПолученные погрешности аппроксимации соответствуют идеальным условиям работы АЦП в передающем устройстве: зона нечувствительности нуль-органа не превышает половины кванта, эталонные резисторы идеальны, работа схемы АЦП не зависит от напряжений питания и сопротивлений нагрузки и т. п. В реальных АЦП максимальная погрешность квантования по уровню может достигать целого кванта, т. е. в 2 раза превосходить статическую погрешность идеальной аппроксимации. Поэтому в практических расчетах статическую погрешность с определенным запасом следует принимать равной удвоенному значению (2.9), т. е.![]() .
.
При этом расчетное значение СКО телепередачи с учетом (2.15) определяется следующим образом:
![]() (2.16)
(2.16)
В многоканальных ТИС с постоянным циклом передачи Тц все параметры опрашиваются и передаются циклически через равные промежутки времени То = Тц. С увеличением числа контролируемых параметров длительность цикла увеличивается, что приводит к увеличению динамической погрешности ТИ и времени запаздывания передачи дискретных заявок, являющихся следствием возникновения ТС или редких изменений контролируемых процессов — так называемых ’’толчков” параметров.
Наибольшей погрешностью обладают наиболее быстро меняющиеся параметры. Поэтому, чтобы погрешность всей системы ТИ не превысила допустимую погрешность ДОП, время цикла приходится выбирать по самому быстро меняющемуся параметру (имеющему максимальное значение = ).
Решая (2.13) при![]() относительно То, получаем
относительно То, получаем
![]() (2.17)
(2.17)
Таким образом, увеличение частоты изменения параметра при заданной точности передачи требует уменьшения цикла передачи, что связано с увеличением скорости передачи сигналов по каналу связи, т. е. с увеличением ширины полосы пропускания канала связи. С другой стороны, медленно меняющиеся параметры (с малой величиной ) при этом обслуживаются чаще, чем это необходимо из условия обеспечения заданной точности. Возникающие при этом избыточные обслуживания обусловливают неэффективное использование канала связи.
Другим ограничением при выборе То является обеспечение заданного времени задержки передачи дискретного изменения параметров Sдоп, среднее значение которого равно![]() ,
,
т. е.
![]() (2.18)
(2.18)
Из условий (2.17) и (2.18) должно быть выбрано наименьшее значение То, обеспечивающее заданные величины ДОП и ДОП. Естественно, что обеспечение меньшего значения То требует при прочих равных условиях большей скорости передачи сигналов. Более рациональными с точки зрения эффективности использования канала связи являются многоканальные системы с индивидуальными циклами, учитывающими статистику изменения параметров ТИ [6]. В таких системах обеспечиваются индивидуальные циклы передачи (Тоi) параметров ТИ, значения которых обратно пропорциональны частотам изменения измеряемых параметров. Применение систем с индивидуальными циклами позволяет выравнивать СКО передачи для всех параметров ТИ (путем уменьшения СКО для быстро меняющихся параметров и соответственного увеличения СКО для медленно меняющихся) и тем самым уменьшать требуемую полосу пропускания канала связи при заданой СКО системы ТИ. Другим преимуществом многоканальных ТИС с индивидуальными циклами является ограничение заданного запаздывания Sдon для части параметров ТИ или передачи группы дискретных сигналов ТС. Выделяя для этих параметров индивидуальный цикл Т , ограничиваем среднее запаздывание передачи дискретных изменений (или сигналов ТС) значением 0,5TOs.
Реализация многоканальных ТИС с индивидуальными циклами не представляет труда.
Недостатком системы с индивидуальными циклами, как всякой системы, построенной на основании априорных статистических зависимостей, является ухудшение характеристик системы при отклонении реальных контролируемых процессов от среднестатистических.