Телеконтроль и телеуправление в энергосистемах - Микропроцессорные системы телемеханики
- Телеконтроль и телеуправление в энергосистемах
- Введение
- Функции систем телемеханики
- Типовые структуры систем ТМ
- Структурная схема и основные функциональные блоки системы ТМ
- Структура диспетчерского управления
- Система сбора и передачи оперативных данных на высших уровнях диспетчерского управления
- СПОД на уровне ЦДУ ЕЭС
- СПОД в энергосистемах
- Многоуровневая телеинформационно-управляющая система
- Автоматизированная система АСДУ РС
- Телемеханические сообщения и обслуживание случайных процессов
- Методы передачи оперативной информации в телеинформационных системах АСДУ
- Погрешности телеизмерения
- Погрешность передачи телеизмерений в многоуровневых системах
- Информация и управление
- Структурные характеристики дискретных сигналов
- Основные характеристики кодов
- Числовые коды
- Сменно-качественные коды
- Коды с обнаружением и исправлением ошибок
- Коды Хэмминга
- Повышение эффективности кодирования использованием коррелированности сообщений
- Передача сообщений в телемеханических системах
- Кодовые форматы с постоянным и переменным числом информационных кодовых слов
- Кодовый формат протокола HDLC
- Диалоговые процедуры передачи телемеханической информации
- Примеры применения диалоговых процедур
- Микропроцессорные системы телемеханики
- Микропроцессорная адаптивная информационно-управляющая система АИСТ
- Математическое обеспечение, технические данные АИСТ
- Телекомплекс ГРАНИТ
- Устройство КП, конструкция ГРАНИТ
- Управляющий вычислительный телемеханический комплекс УВТК-120
- Программируемые канальные адаптеры
- Система телемеханики GEADAT81GT
- Система телемеханики TRACEC
- Система телемеханики URSATRANS
- Особенности структур систем телемеханики для распределительных сетей
- Комплекс устройств телемеханики МКТ-3
- Система телемеханики ТМРС-10
- Аппаратура тонального канала связи АТКС-10
- Достоверность приема сообщений в телекомплекс ТРС-1
- Телемеханический комплекс КТМ-50
- Система циркулярного телеуправления с обратной телесигнализацией
- Список литературы
Глава пятая
МИКРОПРОЦЕССОРНЫЕ СИСТЕМЫ ТЕЛЕМЕХАНИКИ
- ОБЩАЯ ХАРАКТЕРИСТИКА
Новый этап развития телемеханики характеризуется разработкой и широким внедрением программируемых телекомплексов, построенных по принципу микроЭВМ на программируемых микросхемах. Роль центрального программного устройства в таких телекомплексах выполняют либо универсальные, либо специализированные микроЭВМ на микропроцессорных модулях, ориентированные на выполнение телемеханических функций.
Принципиальное отличие микропроцессорных систем от традиционных систем телемеханики предыдущего поколения (на интегральных микросхемах низкого и среднего уровня интеграции) состоит в том, что функции и параметры микропроцессорных систем задаются программными средствами при неизменной электрической схеме и конструкции устройств.
Возможность изменения функционального назначения и параметров системы программным путем существенно повышает гибкость и универсальность систем на различных объектах управления, снижает затраты на производство аппаратуры, облегчает адаптацию системы к изменяющимся условиям эксплуатации и т. п.
Микропроцессорные телекомплексы позволяют реализовать значительно более широкие функции по сбору, передаче и обработке телеинформации, чем традиционные телемеханические системы. Так, на базе микропроцессорных устройств на уровне диспетчерских пунктов (ДП) выполняются центральные приемо-передающие станции (ЦСТ), осуществляющие сбор информации по каналам связи с множества контролируемых пунктов (КП) и информационный обмен с ЦСТ смежных и вышестоящих уровней диспетчерского управления. В функции ЦСТ кроме традиционных телемеханических задач входят также телеобработка данных, управление средствами отображения индивидуального и общего пользования, слежение за пределами изменения параметров, достоверизация, регистрация, хранение данных, формирование схем, таблиц, ведомостей в виде, удобном для оперативного использования диспетчерским персоналом.
Программным путем реализуются различные адаптивные алгоритмы передачи информации, повышающие эффективность использования каналов связи и обеспечивающие гибкие приоритеты передачи сообщений. Эти алгоритмы реализуются как на уровне КП при обработке первичных параметров ТИ и ТС, так и на уровне ДП при ретрансляции информации на вышестоящие уровни управления и при вводе данных в ЭВМ оперативно-информационного комплекса.
Благодаря применению программируемых микропроцессорных элементов устройства КП приобретают свойства так называемых интеллектуальных терминалов, которые занимают канал передачей информации только при необходимости (изменение состояния ТС, нарушения заданных пределов изменения ТИ и т. п.).
В микропроцессорных системах достаточно просто реализуется принцип самотестирования аппаратуры, включая аппаратуру каналов связи. При этом могут быть обеспечены непрерывный контроль исправности телекомплекса и регистрация статистических данных по повреждаемости его элементов. Для обеспечения высокой надежности работы телекомплекса его центральная часть выполняется в виде сдвоенной микроЭВМ, обеспечивающей 100%-ный резерв. Каждая микроЭВМ рассчитана на выполнение полного объема задач телекомплекса.
В нормальном режиме микроЭВМ могут работать независимо друг от друга. При выходе из строя одной из машин другая берет на себя весь объем обработки. Аппаратура телекомплекса должна быть рассчитана на непрерывный режим работы без постоянного обслуживания, с автоматическим перезапуском системы после восстановления питания, устранения повреждений каналов связи, самопроизвольного зацикливания программ и т. п. Условия эксплуатации телекомплексов должны соответствовать требованиям стандартов на устройства телемеханики.
Важной особенностью микропроцессорных телекомплексов является возможность совместимости ЦСТ на программном уровне с устройствами телемеханики различных типов. Это дает возможность использования на объектах существующих устройств ТМ и поэтапной их замены на интеллектуальные терминалы.
Структура микропроцессорных телекомплексовМикропроцессорный телекомплекс (МТК), как и любая система телемеханики, состоит из устройств, расположенных в пунктах управления (устройства ДП) и на объектах контроля и управления (устройства КП). Основным устройством ДП является центральная приемопередающая станция (ЦСТ), к которой сходятся каналы связи от всех КП телекомплекса, на которых расположены периферийные станции (ПСТ) системы. В зависимости от конфигурации, образованной каналом связи и устройствами ДП (ЦСТ) и КП (ПСТ), различаются следующие структуры* МТК (см. рис. В.3):
структура точка—точка;
многоточечная радиальная структура один—один (с одновременным обменом ЦСТ—ПСТ);
многоточечная радиальная структура один— N (с последовательным во времени обменом ЦСТ—ПСТ);
многоточечная магистральная структура; многоточечная кольцевая структура; структура ’’каждый с каждым”.
Телекомплекс может объединять несколько видов структур, образовывая смешанную иерархическую структуру, содержащую несколько ЦСТ и ПСТ.
Центральная часть ЦСТ представляет собой микроЭВМ с магистрально-блочной структурой. Центральный блок управления (ЦБУ) содержит модуль микропроцессора (МКЛ) с элементами оперативной (ОЗУ) и переграммируемой постоянной (ППЗУ) памяти, элементами прерывания, системного контроллера, таймером и т. п. (рис. 5.1). В некоторых телекомплексах роль ЦБУ выполняет стандартная встроенная микроЭВМ либо внешняя микроЭВМ (а иногда и мини-ЭВМ). Примерами МТК со встроенными микроЭВМ являются ГРАНИТ [31], а с внешней микроЭВМ — GEADAT-81 (см. § 5.3).* Классификация структур дана в соответствии с [1] и [41, публикация 870.1.1].-
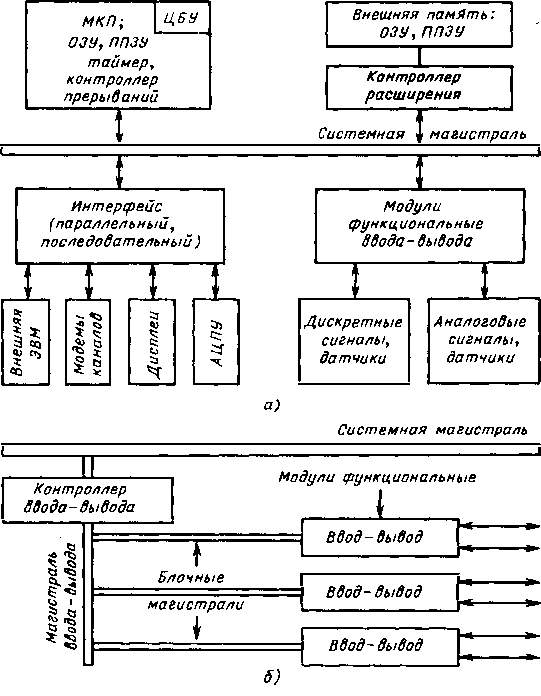
Рис. 5.1. Обобщенная структура микропроцессорных телекомплексов (МТК): а - с единой системной магистралью; б - с вторичными (блочными) магистралями ввод-вывод; ЦБУ - центральный блок управления; МКЛ — модуль микропроцессора; ОЗУ, ППЗУ - модули оперативной и перепрограммируемой постоянной памяти
Микропроцессорный модуль управляет системной магистралью, к которой подключаются: модули дополнительной внешней памяти ОЗУ и ПИЗУ (через соответствующий контроллер расширения) в количестве, определяемом требуемой функциональной емкостью, модули интерфейса (параллельного, последовательного) для подключения внешней ЭВМ, каналов связи (модемов), дисплеев, АЦПУ и функциональные модули ввода-вывода технологического назначения (ТУ, ТИ, ТС и т. п.).
По способу подсоединения модулей ввода—вывода к системной магистрали могут быть выделены две структуры: микроЭВМ с единой
системной магистралью и с вторичной магистралью ввода—вывода. В первой структуре (рис. 5.1, а) модули ввода—вывода присоединяются непосредственно к общей системной магистрали. Такая структура при значительном числе модулей требует специальных расширителей магистрали для компенсации запаздывания сигналов с увеличением протяженности магистрали. Примером структуры с единой магистралью является ЦСТ, построенная на базе микроЭВМ СМ-1800.
Наиболее распространенной для МТК является структура с выделенными вторичными блочными магистралями ввода—вывода, которые через общую магистраль ввода—вывода подсоединяются к системной магистрали (рис. 5.1, б). Вторичные магистрали организуются в пределах конструктивного блока с набором определенного числа функциональных модулей ввода—вывода. Эти магистрали обеспечивают возможность удаления отдельных внешних устройств на значительные расстояния (десятки и сотни метров) от ЦБУ. Для большей помехозащищенности на вторичных магистралях ввода—вывода устанавливается повышенное напряжение сигналов (по сравнению с системной магистралью) .
В состав телекомплексов входит ограниченный набор функциональных (технологических) модулей ввода—вывода, обеспечивающих сопряжение станций с контролируемым процессом на КП и средствами управления и отображения информации на ПУ.
Периферийные станции телекомплексов могут выполняться либо в виде программируемых (интеллектуальных) устройств, либо в виде устройств с жесткой логикой (неинтеллектуальные КП). В первом случае общая структурная схема для ЦСТ и ПСТ совпадает и станции отличаются лишь объемом памяти и набором функциональных модулей ввода—вывода и внешнего интерфейса. Неинтеллектуальные ПСТ предназначены преимущественно для необслуживаемых КП со сложными метеорологическими условиями.