Телеконтроль и телеуправление в энергосистемах - Погрешность передачи телеизмерений в многоуровневых системах
- Телеконтроль и телеуправление в энергосистемах
- Введение
- Функции систем телемеханики
- Типовые структуры систем ТМ
- Структурная схема и основные функциональные блоки системы ТМ
- Структура диспетчерского управления
- Система сбора и передачи оперативных данных на высших уровнях диспетчерского управления
- СПОД на уровне ЦДУ ЕЭС
- СПОД в энергосистемах
- Многоуровневая телеинформационно-управляющая система
- Автоматизированная система АСДУ РС
- Телемеханические сообщения и обслуживание случайных процессов
- Методы передачи оперативной информации в телеинформационных системах АСДУ
- Погрешности телеизмерения
- Погрешность передачи телеизмерений в многоуровневых системах
- Информация и управление
- Структурные характеристики дискретных сигналов
- Основные характеристики кодов
- Числовые коды
- Сменно-качественные коды
- Коды с обнаружением и исправлением ошибок
- Коды Хэмминга
- Повышение эффективности кодирования использованием коррелированности сообщений
- Передача сообщений в телемеханических системах
- Кодовые форматы с постоянным и переменным числом информационных кодовых слов
- Кодовый формат протокола HDLC
- Диалоговые процедуры передачи телемеханической информации
- Примеры применения диалоговых процедур
- Микропроцессорные системы телемеханики
- Микропроцессорная адаптивная информационно-управляющая система АИСТ
- Математическое обеспечение, технические данные АИСТ
- Телекомплекс ГРАНИТ
- Устройство КП, конструкция ГРАНИТ
- Управляющий вычислительный телемеханический комплекс УВТК-120
- Программируемые канальные адаптеры
- Система телемеханики GEADAT81GT
- Система телемеханики TRACEC
- Система телемеханики URSATRANS
- Особенности структур систем телемеханики для распределительных сетей
- Комплекс устройств телемеханики МКТ-3
- Система телемеханики ТМРС-10
- Аппаратура тонального канала связи АТКС-10
- Достоверность приема сообщений в телекомплекс ТРС-1
- Телемеханический комплекс КТМ-50
- Система циркулярного телеуправления с обратной телесигнализацией
- Список литературы
Система сбора информации, необходимой для оперативного управления режимами энергосистем, имеет многоуровневую структуру, соответствующую иерархической структуре диспетчерского управления. На энергообъектах - источниках информации - устанавливаются передатчики (ПД) кодоимпульсных устройств телемеханики либо терминалы микроЭВМ, производящие опросы датчиков ТИ и ТС и передающие информацию в кодовой форме на диспетчерский пункт нижней ступени управления ДП0 (рис. 2.5). Это может быть ДП предприятий электросетей либо центральный ДП энергосистемы - в зависимости от подчиненности энергообъекта. На ДП0 информация от приемников УТМ ПР поступает в систему обработки и отображения телеинформации СОТ. Часть информации, необходимой для диспетчеров высших ступеней, ретранслируется на ДП1, ДП2 и т. д. путем опроса приемных УТМ передающим УТМ соответствующего уровня. Если на ДП установлена центральная станция ЦСТ на микроЭВМ, то она осуществляет функции приема и ретрансляции, а также ввода информации в ЭВМ ОИК АСДУ. Однако суть процесса ретрансляции телеинформации на следующую ступень диспетчерского управления не зависит от того, используются ли для ретрансляции УТМ или ЦСТ.
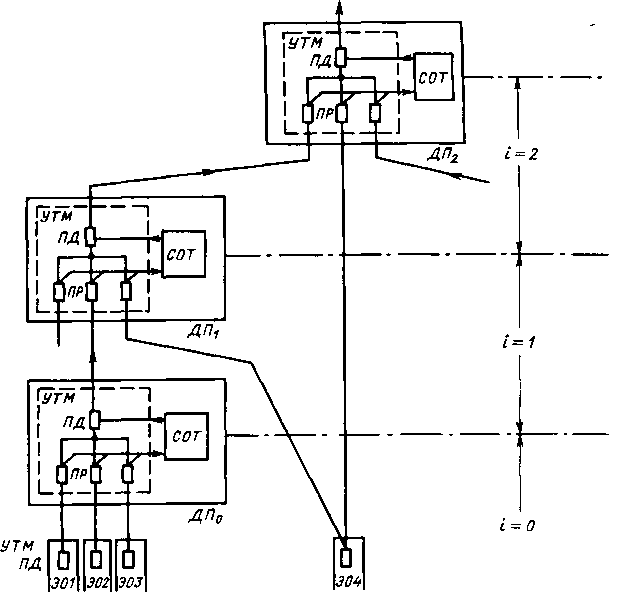
Рис. 2.5. Структура многоуровневой системы передачи информации:
УТМ - устройства телемеханики; ПД - передающее УТМ; ПР - приемные УТМ; ЭО - энергообъекты; СОТ - система обработки и отображения телеинформации
С ростом числа ступеней ретрансляции i увеличиваются погрешность передачи ТИ и время запаздывания дискретной информации, а также уменьшается надежность поступления информации на высшие уровни управления. Поэтому число ступеней ретрансляции обычно не превышает двух-трех. Для наиболее ответственных ЭО организуется прямая передача на соответствующие ДП (на рис. 2.5 показан один из таких объектов ЭО4). Однако организация прямых каналов связи сопряжена с существенными затратами и не всегда осуществима.
Для уменьшения суммарной погрешности передачи в многоуровневых системах ретрансляция должна осуществляться по методу код- код, т. е. кодовое значение ТИ предшествующего уровня является исходным для кода ТИ следующего уровня (без дополнительных преобразований код—аналог, аналог—код). При этом предполагается, что число информационных разрядов кода при ретрансляции ТИ остается одинаковым, во всяком случае оно не меньше, чем на исходном уровне. При соблюдении этих условий можно утверждать, что погрешность ТИ с ростом числа уровней ретрансляции увеличивается лишь за счет динамической составляющей погрешности, обусловленной повторными дискретизациями по времени цифровых эквивалентов значений передаваемых параметров в пунктах ретрансляции.
Сложные двоичные сигналыВ современных телемеханических системах применяются различные импульсные последовательности для передачи двоичных кодов. Эти последовательности состоят из элементарных двоичных сигналов, определенным образом связанных друг с другом. Наличие этих связей обусловливает повышение помехоустойчивости сигнала в целом.
На рис. 2.18 представлены некоторые из двоичных последовательностей, принятых различными фирмами в качестве стандартных. В импульсной последовательности (рис. 2.18, а) для передачи двоичного кода используется импульсный признак ”да—нет”: 1 передается наличием импульса, 0 — его отсутствием. Такие сигналы именуются беспаузными (поскольку разделительные паузы между 1 и 0 отсутствуют) , либо ’’без возврата к нулю” — NRZ. Элементарные сигналы в данной двоичной последовательности взаимонезависимы, поэтому для определения помехоустойчивости двоичного сигнала в целом можно воспользоваться рассмотренными выше методами определения вероятностей переходов 10. Использование NRZ-сигналов ограничивается наличием постоянной составляющей при большом числе следующих подряд ’’единиц” или ’’нулей”, что отрицательно сказывается на прохождении сигналов через разделительные трансформаторы.
Для устранения этого недостатка применяют сигнал с ’’чередующейся инверсией знака” (рис. 2.18, б). Сигнал 0 передается чередующимся высоким потенциалом (положительным или отрицательным), а сигнал 1 — нулевым уровнем. Чтобы исключить постоянную составляющую, передатчик после пяти 1 подряд вставляет 0 (процедура бит-стаффинга). Приемник при декодировании изымает вставленный 0. Благодаря применению чередующейся полярности импульсов для передачи 0 помехоустойчивость такого сигнала повышается, однако увеличивается сложность приема сигналов и уменьшается его плотность за счет бит-стаффинга.
На рис. 2.18, в представлен сигнал с дискретной широтно-импульсной модуляцией ДШИМ (DPLM). Сигналы 0 и 1 отличаются друг от друга длительностью между переходами от высокого уровня к низкому и наоборот. На рисунке показано, что нуль соответствует длительности Г, а единица — 3t. Возможны и другие соотношения. Характерной особенностью сигналов ДШИМ является то, что рядом стоящие сигналы всегда имеют разное качество: если предшествующий сигнал имеет высокий потенциал (импульс), то следующий сигнал — низкий (пауза). Благодаря этому такой сигнал может быть отнесен к ’’сменно-качественным” сигналам (см. § 3.5). Число переходов в кодовом слове всегда постоянно, хотя его длительность может быть различна.
Постоянство числа фронтов в ДШИМ может использоваться для самосинхронизации генераторов (пошаговая синхронизация).
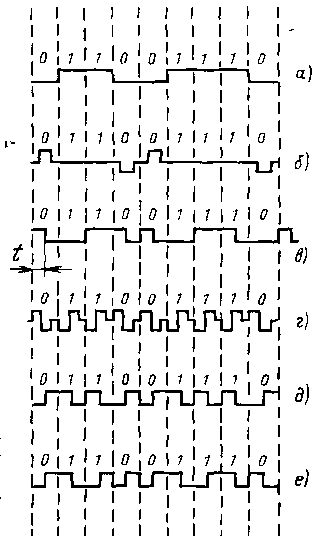
Рис. 2.18. Импульсные последовательности при передаче двоичных кодов:
а - беспаузный двоичный сигнал (NRZ); б - чередующаяся инверсия полярности 0; в - дискретная широтноимпульсная модуляция (ДШИМ); г - биполярная модуляция; д - сигнал ’’Манчестер II” (PROWAY); е - сигнал ”диф. Манчестер” (IEEE-802)
Помехоустойчивость сигналов с ДШИМ рассматривается в § 3.5.
На рис. 2.18, г представлен сигнал с биполярной модуляцией. В то время как рассмотренные выше импульсные последовательности имеют один элементарный сигнал на бит, при биполярной модуляции бит делится на три элементарных сигнала: 0- передается двухполярным сигналом ”+”, 1 — двухполярным сигналом
Сигналы разделяются пробелом длительностью 1/3 бит. Для образования ложного бита необходимо инвертирование полярностей элементарных сигналов в течение бита при сохранении неизменной длительности разделительного пробела. Такая инверсия маловероятна, поэтому помехоустойчивость сигналов с биполярной модуляцией достаточно высока. Однако из-за наличия разделительных интервалов сигнал малоэффективен с точки зрения плотности бита.
На рис. 2.18, д и е представлены импульсные двоичные сигналы, получившие в зарубежной практике название ’’Манчестер”. Их отличительной чертой является то, что переходы с высокого потенциала на низкий и наоборот всегда располагаются посередине бита, причем число этих переходов в последовательности всегда постоянно. Последнее обстоятельство используется для самосинхронизации генераторов приемника и передатчика. В сигнале Манчестер II (рис. 2.18, д) бит 0 соответствует переходу с низкого уровня на высокий, бит 1 — переходу с высокого уровня на низкий. Этот сигнал в отечественной практике носит название корреляционного кода или кода с двойными коррелированными символами. Для инверсии бита необходимы одновременные переходы 0 1, 1 0 в пределах одного бита, что маловероятно. Помехоустойчивость такого сигнала рассматривается в § 3.4.
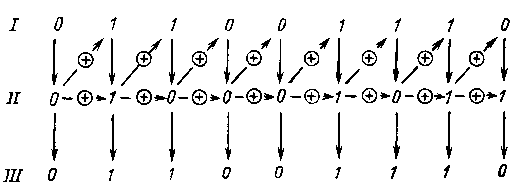
Рис. 2.19. Прямое и обратное преобразование простого двоичного кода в сигнал ”диф. Манчестер”:
I - двоичный код; II - сигнал ”диф. Манчестер”; III - восстановление двоичного кода
Последовательность Манчестер II рекомендована известным стандартом PROWAY. Более поздняя публикация IEEE-802.4 рекомендует последовательность ’’дифференциальный Манчестер” (рис. 2.18, е). Сигналы этой последовательности образуются следующим образом: очередной бит ’’дифференциальный Манчестер” равен биту исходного двоичного кода плюс по модулю 2 значение предыдущего бита ”диф. Манчестер”. Так, например, двоичная последовательность 011001110 записывается сигналами ”диф. Манчестер” следующим образом: 10001011.
Преобразование сигналов из двоичной последовательности в сигналы ”диф. Манчестер” и обратное восстановление двоичной последовательности из сигналов ”диф. Манчестер” иллюстрируются рис. 2.19.
Помехоустойчивость сигналов ”диф. Манчестер” более высокая, чем сигналов Манчестер II, поскольку инверсия одного бита, требующая двукратной ошибки, с инверсией полярностей приводит к ошибке в соседнем бите, т. е. увеличивает кратность не обнаруживаемых ошибок,