Телеконтроль и телеуправление в энергосистемах - Система сбора и передачи оперативных данных на высших уровнях диспетчерского управления
- Телеконтроль и телеуправление в энергосистемах
- Введение
- Функции систем телемеханики
- Типовые структуры систем ТМ
- Структурная схема и основные функциональные блоки системы ТМ
- Структура диспетчерского управления
- Система сбора и передачи оперативных данных на высших уровнях диспетчерского управления
- СПОД на уровне ЦДУ ЕЭС
- СПОД в энергосистемах
- Многоуровневая телеинформационно-управляющая система
- Автоматизированная система АСДУ РС
- Телемеханические сообщения и обслуживание случайных процессов
- Методы передачи оперативной информации в телеинформационных системах АСДУ
- Погрешности телеизмерения
- Погрешность передачи телеизмерений в многоуровневых системах
- Информация и управление
- Структурные характеристики дискретных сигналов
- Основные характеристики кодов
- Числовые коды
- Сменно-качественные коды
- Коды с обнаружением и исправлением ошибок
- Коды Хэмминга
- Повышение эффективности кодирования использованием коррелированности сообщений
- Передача сообщений в телемеханических системах
- Кодовые форматы с постоянным и переменным числом информационных кодовых слов
- Кодовый формат протокола HDLC
- Диалоговые процедуры передачи телемеханической информации
- Примеры применения диалоговых процедур
- Микропроцессорные системы телемеханики
- Микропроцессорная адаптивная информационно-управляющая система АИСТ
- Математическое обеспечение, технические данные АИСТ
- Телекомплекс ГРАНИТ
- Устройство КП, конструкция ГРАНИТ
- Управляющий вычислительный телемеханический комплекс УВТК-120
- Программируемые канальные адаптеры
- Система телемеханики GEADAT81GT
- Система телемеханики TRACEC
- Система телемеханики URSATRANS
- Особенности структур систем телемеханики для распределительных сетей
- Комплекс устройств телемеханики МКТ-3
- Система телемеханики ТМРС-10
- Аппаратура тонального канала связи АТКС-10
- Достоверность приема сообщений в телекомплекс ТРС-1
- Телемеханический комплекс КТМ-50
- Система циркулярного телеуправления с обратной телесигнализацией
- Список литературы
Телемеханизация диспетчерских пунктов трех высших уровней диспетчерского управления практически была завершена в 60-е годы на
базе УТМ 2-го поколения. Новый этап развития систем сбора и передачи диспетчерской информации связан с созданием АСДУ. К середине 70-х годов АСДУ были созданы во всех объединенных и ряде крупных энергосистем. В этих условиях роль системы телемеханики еще более возросла в связи с необходимостью оперативного информационного обеспечения ЭВМ, входящих в состав АСДУ, включая межмашинный информационный обмен между ОИК АСДУ разных уровней диспетчерского управления. Резко возросли объем информации, передаваемой в режиме реального времени, и ее функциональное назначение, повысились требования к надежности, достоверности и быстродействию передаваемых сообщений. Удовлетворение этих требований в условиях низкоскоростных каналов передачи сигналов телемеханики привело к необходимости применения дополнительной обработки информации в местах ее передачи и приема, а именно: сжатия сигналов и введения приоритетов сообщений при передаче по каналам связи, дополнительной достоверизации информации, разгрузки ЭВМ ОИК от выполнения рутинных операций при вводе и первичной обработке телеинформации и т. д. В связи с новыми требованиями системы телемеханики 3-го поколения (системы на интегральных микросхемах с жесткосхемной структурой) были заменены на высших уровнях диспетчерского управления (начиная с конца 70-х годов) программируемыми устройствами приема—передачи оперативной информации, выполняемыми на базе универсальных микроЭВМ.
В настоящее время на трех верхних уровнях диспетчерского управления функционирует система передачи оперативных данных (СПОД), выполненная на микроЭВМ РПТ-70 и РПТ-80 (производство завода ’’Видеотон”, ВНР). Основными элементами СПОД являются центральные приемо-передающие станции, установленные на диспетчерских пунктах ЦДУ ЕЭС, на всех ОДУ ОЭС и многих ЦПД энергосистем; ЦППС выполнены на двух взаиморезервирующих микроЭВМ РПТ. В состав аппаратных модулей РПТ включены специально разработанные и поставляемые фирмой ’’Видеотон” платы сопряжения с каналами связи (программируемые канальные адаптеры).
Основные принципы СПОД Программируемость основных функций.Благодаря применению микроЭВМ и микропроцессорных устройств основные функции и параметры системы - информационная емкость, число обслуживаемых каналов связи и др. — задаются программным путем. Это обеспечивает необходимую гибкость системы и универсальность ее применения в конкретных условиях эксплуатации, сравнительно незначительные расходы на перестройку системы при ее расширении и т. п. Все изменения в системе сводятся к изменению программ без вмешательства в электронную схему аппаратов. Программное обеспечение состоит из системных программ, обеспечивающих выполнение основных функций системы, и пользовательских программ, которые записываются пользователем в соответствии с конкретными условиями применения.
Централизация приема информации на диспетчерских пунктах.Вместо многочисленных приемников УТМ (по числу каналов связи) и ретранслирующего УТМ на ДП устанавливается единая централизованная приемо-передающая станция·, обеспечивающая независимый прием информации от множества (до 64) каналов связи и дальнейшую ретрансляцию ее на вышестоящий ДП. Централизация приема информации со всех каналов и ретрансляция ее в одном устройстве повышают экономичность системы за счет существенного сокращения площадей аппаратных помещений, числа кабельных связей и т. п. Одновременно обеспечивается возможность полного дублирования приема и передачи информации по всем направлениям одним резервным аппаратом ЦППС.
* Далее по тексту, а также на рис. 1.2 централизованная приемо-передающая станция обозначается ЦППС либо ЦСТ (централизованная станция телемеханики). Кроме того, ЦСТ облегчает ввод информации в ЭВМ оперативно-информационного управляющего комплекса, являясь по существу концентратором информации, выполняющим функции предпроцессора. И, наконец, программируемая ЦППС выполняет функцию ’’коммутации сообщений”, комплектуя по заданному алгоритму сообщения, посылаемые к вышестоящему ДП.
Адаптивность и сжатие сообщений.Передающие станции системы работают по принципу ’’интеллектуальных терминалов”, т. е. сами принимают решение о необходимости передачи в канал связи с ЦППС тех или иных сообщений и их приоритетности в зависимости от состояния контролируемых процессов в текущий момент времени. Система передачи, обладающая свойством приспосабливаемости к текущей ситуации, называется адаптивной, а метод передачи — адаптивным. При использовании адаптивного метода исключается передача не обновленных сообщений, характерная для циклического метода передачи в УТМ. При этом передаваемые сообщения как бы сжимаются за счет исключения из передачи малоинформативных сообщений. Тем самым увеличивается пропускная способность каналов связи, т. е. повышается эффективность их использования. Коэффициент полезного действия мини-ЭВМ ОИУК также повышается за счет разгрузки ее от переработки неинформативных сообщений.
Реализация адаптивных методов передачи определяется соответствующей программой.
Многофункциональность передаваемой информации.Информация, циркулирующая в СПОД, предназначена для выполнения различных функций диспетчерского управления энергосистемами. Адаптивные алгоритмы передачи и развитая система приоритетов позволяют совместить в одной системе передачу информации для оперативно-диспетчерского контроля и управления (ТИ, ТС, ТУ), межмашинного межуровневого обмена цифро-буквенной информацией (ЦБИ) и сбора данных суточной ведомости, а также для систем автоматического телерегулирования и противоаварийной автоматики. Система кодирования передаваемой информации в СПОД обеспечивает минимальные задержки передачи высокоприоритетных сообщений.
Совместимость и поэтапный ввод системы в эксплуатацию "сверху вниз".В СПОД предусмотрена возможность подключения к канальным входам ЦППС каналов от находящихся в эксплуатации УТМ. Для этой цели ЦППС имеют специальные программируемые канальные адаптеры, которые настраиваются на прием информации от передатчиков УТМ. На первом этапе внедрения СПОД ЦППС устанавливаются на верхнем уровне управления в ЦДУ ЕЭС СССР. Канальные входы ЦППС подключаются к каналам связи параллельно с существующими УТМ (для этого канальные входы ЦППС должны быть достаточно высокоомными). По мере отладки программ приема весь комплекс УТМ в ЦДУ ЕЭС заменяется одной ЦППС. На втором этапе ЦППС устанавливаются в ОДУ ОЭС, заменяя ретранслирующие и приемные УТМ. В конце этого этапа СПОД эксплуатируется по схеме: ЦППС ЦДУ ЕЭС СССР - ЦППС на всех ОДУ ОЭС — передатчики УТМ на ДП энергосистем и энергообъектов, подчиненных ОДУ ОЭС. На последующих этапах внедрения осуществляется замена УТМ на ЦППС в энергосистемах и т. д. при движении ’’сверху вниз” до уровня энергообъектов. Принцип внедрения ’’сверху вниз” обеспечивает бесперебойную эксплуатацию телеинформационных систем на всех уровнях диспетчерского управления.
Разделение функций между микроЭВМ СПОД и мини-ЭВМ ОИУК.На верхних уровнях диспетчерского управления образуется сложный многомашинный комплекс, состоящий, как правило, из двух микроЭВМ СПОД и двух мини-ЭВМ ОИУК. При организации этого комплекса возникает задача рационального распределения функций приема и обработки телеинформации между микроЭВМ и мини-ЭВМ.
МикроЭВМ СПОД выполняет функцию предпроцессора мини-ЭВМ, обеспечивая ввод телеинформации со всех каналов связи в едином формате. При этом микроЭВМ СПОД заменяет периферийные модули ввода мини-ЭВМ или специализированные устройства ввода (типа УСТМ) и благодаря предварительной обработке вводимой телеинформации уменьшает загрузку мини-ЭВМ. Высвобождающееся машинное время (примерно 10—15% общего времени) позволяет полнее использовать логические и вычислительные возможности мини-ЭВМ для решения ряда оперативных задач. С другой стороны, при наличии мини-ЭВМ некоторые функции по обработке и отображению телеинформации целесообразно выполнять программами мини-ЭВМ. К таким функциям относятся, в частности:
управление дисплеями при отображении телеинформации и в режиме диалога диспетчер-СПОД;
масштабирование при цифровом воспроизведении ТИ;
ввод и вывод цифро-буквенной информации;
арбитраж по назначению одной из двух взаимно резервирующих микроЭВМ главной.
Вместе с тем с целью повышения надежности многомашинного комплекса часть наиболее важной оперативной информации должна выводиться на средства отображения напрямую из микроЭВМ.
На тех диспетчерских пунктах нижних уровней управления, где мини-ЭВМ ОИУК отсутствуют, программное обеспечение микроЭВМ СПОД должно предусматривать выполнение функций информационной системы ОИУК (в упрощенном варианте).
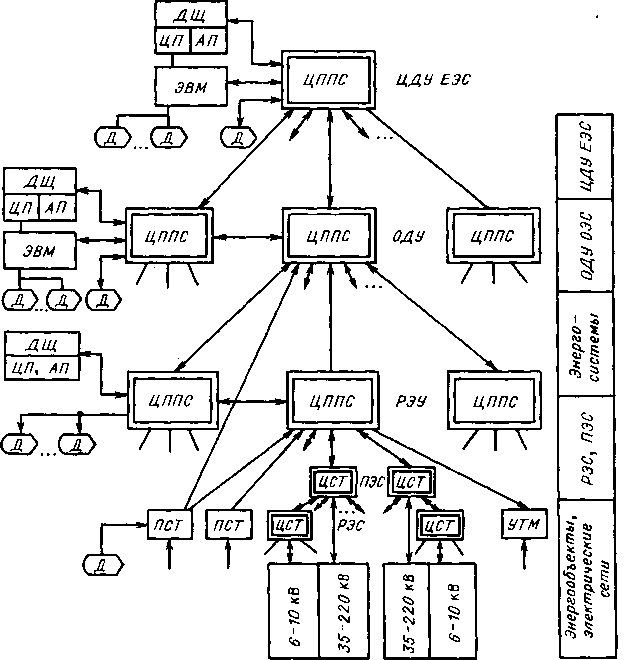
Рис. 1.2. Структура СПОД:
ЦППС, ЦСТ - центральные приемо-передающие станции; ПСТ - периферийная станция; УТМ — устройство телемеханики; ДЩ — диспетчерский щит; ЦП - цифровые приборы; АП - аналоговые приборы; Д ~ дисплей
Конфигурация сети СПОД.Основная структура сети связи на верхних уровнях управления — радиальная (рис. 1.2). ЦППС СПОД связана со всеми нижестоящими ДП или энергообъектами независимыми дуплексными каналами связи. Число дуплексных каналов, обслуживаемых одной ЦППС, — до 64 (с учетом резервных каналов — 128), из них обычно два канала используются для передачи информации на вышестоящий ДП, а остальные — для приема информации с нижестоящих объектов. Такая структура сети (называемая радиальной многоточечной) дает возможность независимого приема информации со всех каналов связи и обеспечивает минимальные задержки сбора информации. ЦППС СПОД полностью использует эту возможность, обеспечивая одновременный независимый прием информации со всех каналов связи.
Наряду с радиальными каналами на уровнях ОДУ энергосистем организуются поперечные связи между смежными ЦППС одного и того же уровня. При этом образуется радиально-кольцевая структура связи, которая обеспечивает дополнительную живучесть системы, а также позволяет обмениваться информацией с ’’соседом”. При наличии у данной ЦППС связей с верхней и смежной ЦППС информация на верхнюю ЦППС может поступать через смежную ЦППС в случае повреждения прямого канала. Аналогично при повреждении канала со смежной станцией информация на нее может поступать через ЦППС верхнего уровня.
Для большей надежности все каналы связи и ЦППС СПОД должны быть дублированы. Нормально информация от передающей ЦППС передается одновременно по основному и резервному каналам связи и с одного из них вводится в обе приемные ЦППС верхнего уровня.