Телеконтроль и телеуправление в энергосистемах - Структурная схема и основные функциональные блоки системы ТМ
- Телеконтроль и телеуправление в энергосистемах
- Введение
- Функции систем телемеханики
- Типовые структуры систем ТМ
- Структурная схема и основные функциональные блоки системы ТМ
- Структура диспетчерского управления
- Система сбора и передачи оперативных данных на высших уровнях диспетчерского управления
- СПОД на уровне ЦДУ ЕЭС
- СПОД в энергосистемах
- Многоуровневая телеинформационно-управляющая система
- Автоматизированная система АСДУ РС
- Телемеханические сообщения и обслуживание случайных процессов
- Методы передачи оперативной информации в телеинформационных системах АСДУ
- Погрешности телеизмерения
- Погрешность передачи телеизмерений в многоуровневых системах
- Информация и управление
- Структурные характеристики дискретных сигналов
- Основные характеристики кодов
- Числовые коды
- Сменно-качественные коды
- Коды с обнаружением и исправлением ошибок
- Коды Хэмминга
- Повышение эффективности кодирования использованием коррелированности сообщений
- Передача сообщений в телемеханических системах
- Кодовые форматы с постоянным и переменным числом информационных кодовых слов
- Кодовый формат протокола HDLC
- Диалоговые процедуры передачи телемеханической информации
- Примеры применения диалоговых процедур
- Микропроцессорные системы телемеханики
- Микропроцессорная адаптивная информационно-управляющая система АИСТ
- Математическое обеспечение, технические данные АИСТ
- Телекомплекс ГРАНИТ
- Устройство КП, конструкция ГРАНИТ
- Управляющий вычислительный телемеханический комплекс УВТК-120
- Программируемые канальные адаптеры
- Система телемеханики GEADAT81GT
- Система телемеханики TRACEC
- Система телемеханики URSATRANS
- Особенности структур систем телемеханики для распределительных сетей
- Комплекс устройств телемеханики МКТ-3
- Система телемеханики ТМРС-10
- Аппаратура тонального канала связи АТКС-10
- Достоверность приема сообщений в телекомплекс ТРС-1
- Телемеханический комплекс КТМ-50
- Система циркулярного телеуправления с обратной телесигнализацией
- Список литературы
На рис. В.4 представлена обобщенная схема системы ТМ простейшей структуры ’’пункт—пункт”. Система ТМ в узком смысле состоит из устройств телемеханики ПУ и КП, соединенных каналом связи. Оконечная аппаратура канала ’’модем” связана с УТМ посредством стандартного или специализированного интерфейса (в зависимости от типа используемого модема). Стандартные модемы CCITT связаны с УТМ по стыку V.24. Специализированные простейшие модемы, применяемые в каналах телемеханики для энергосистем (например, типа АПСТ завода ’’Нептун”), имеют четырехпроводную связь с УТМ, регламентированную техническими условиями на аппаратуру телемеханики.
Система ТМ в ’’широком смысле” дополнительно включает устройства ввода—вывода информации (УВВ ТМ). На ПУ — это устройство отображения и ввода оперативной информации — диспетчерский щит ДЩ и пульт управления ПлУ, контрольный дисплей и регистрирующее печатающее устройство РПУ. Последние устанавливаются в зависимости от возможностей УТМ управлять стандартными средствами ввода- вывода и служат как для отображения и регистрации оперативной информации, так и для расширения сервисных функций при обслуживании УТМ. На диспетчерском щите располагаются основные средства отображения общего пользования: мнемонические схемы контролируемых объектов с сигнальными лампами, стрелочными и цифровыми приборами и т. п. На пульте управления расположены ключи управления, мнемосхема управляемого объекта с сигнальными лампами, табло и другими указывающими приборами. Интерфейс УТМ ПУ—ДЩ может включать в себя ряд промежуточных вспомогательных устройств, входящих в комплекс УТМ ПУ, и задается техническими условиями на этот комплекс.
Для оказания помощи диспетчеру в ведении оперативного режима энергосистем на всех крупных диспетчерских пунктах созданы оперативно-информационные комплексы АСДУ с соответствующими устройствами ввода—вывода информации УВВ ОИК. В состав ОИК входят ЭВМ, получающие телеинформацию непосредственно от УТМ и обрабатывающие ее в темпе поступления, т. е. в режиме реального времени, ЭВМ ОИК управляет средствами отображения индивидуального пользования (дисплей Д) и коллективного пользования (табло ТБ, печатающие устройства АЦПУ, обобщенные символы ДЩ и т.п.). Оперативная информация от диспетчера вводится в ЭВМ через функциональную клавиатуру ФК.
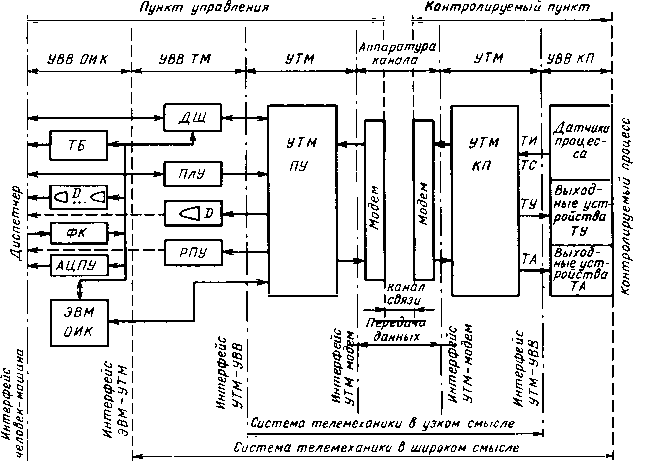
Рис. В.4. Обобщенная схема системы телемеханики ’’пункт-пункт”:
УВВ ОИК — устройства ввода—вывода оперативно-информационного комплекса; УВВ ТМ — устройства ввода-вывода системы телемеханики; УТМ - устройство телемеханики; ПУ — пункт управления; КП — контролируемый пункт; УВВ КЦ — устройства ввода—вывода контролируемого пункта; ТБ — табло диспетчера; D — дисплеи; ФК — функциональная клавиатура; АЦПУ — аналого-цифровое печатающее устройство; ДЩ - диспетчерский щит; ПлУ - пульт управления; РПУ - регистрирующее печатающее устройство; ТИ, ТС, ТУ, ТА - входные и выходные сигналы устройства телемеханики
Таблица В.1. Основные функциональные блоки УТМ
| Наименование блоков | Функциональное назначение | Аппаратура |
| Блоки входа-выхода на КП (сторона контролируемого процесса), устройства ввода-вывода | Преобразование контролируемого физического процесса в электрические сигналы на входе УТМ | Аналоговые цифровые датчики ТК, входные датчики ТК, входные реле ТС |
| Преобразование сигналов на выходе УТМ в команды оперативного управления | Выходные реле ТУ | |
| Блоки обработки входных и выходных сигналов на КП | Фильтрация входных сигналов от помех | Входные фильтры |
| Обработка входных сигналов | Логические схемы | |
| с целью повышения информативности (усреднение, интегрирование, суммирование ТИ; формирование обобщенной ТС) | (программа) | |
| Преобразование аналог-код | АЦП | |
| Запоминание входных и выходных сигналов | Оперативная память | |
| Анализ изменения контрольной информации и формирование сигнала запуска | Логические схемы (программа) | |
| Контроль правильности ТУ | То же | |
| Блоки кодирования и декодирования на КП и ПУ | Преобразование параллельнопоследовательное (и наоборот) | Регистры (программа) |
| Формирование помехозащищенных кодов | Кодер (программа) | |
| Приоритеты передачи Алгоритм отбора сообщений, сжатие сигналов | Логические схемы (программа) | |
| Распознавание и защита от ошибок | Декодер (программа) | |
| Блоки передачи- приема сигналов | Обеспечение надежной и помехозащищенной передачи по каналу связи | Модем, стандарт CCITT; специальный модем |
| Контроль качества сигнала | То же | |
| Синхронизация биг приема-передачи | ||
| Контроль исправности канала связи | »» |
Интерфейс сопряжения УТМ-ЭВК ОИК зависит от многих факторов и в частности от наличия промежуточных устройств сопряжения типа модулей ввода—вывода ЭВМ. Как правило, этот интерфейс схемно или программно реализуется в УТМ ПУ и должен оговариваться в технических условиях на сопряжение с ЭВМ. Единого международного стандарта на интерфейс УТМ—ЭВМ ОИК не существует. Объясняется это, в частности, и тем, что программируемые микропроцессорные устройства телемеханики способны сами выполнять многие функции по оперативной обработке и управлению средствами отображения информации, в связи с чем ЭВМ ОИК все больше разгружаются от непосредственного выполнения функций ввода и рутинной обработки телеинформации, отчего требования к интерфейсу УТМ—ЭВМ, естественно, меняются.
На КП устройствами ввода—вывода УВВ являются датчики ТИ, ТС, аварийных сигналов и других видов контрольной информации, а также выходные устройства ТУ двухпозиционными или многопозиционными объектами, устройства телеавтоматики ТА, телекомандирования и тд.
Интерфейс УТМ—УВВ регламентируется стандартом МЭК ’’Устройства и системы телемеханики” [41, публикация 870.3].
Основные функциональные блоки устройства телемеханики приведены в табл. В.1. Их функции в УТМ могут выполняться либо благодаря фиксированным соединениям между логическими элементами (принцип жесткой логики), либо программным путем (принцип программируемой логики). В последнем случае УТМ имеет структуру специализированной микроЭВМ и ее функции задаются программой.
Классификация основных программных модулей программируемых УТМ приведена на рис. В.5.
Продолжение табл. В.1
| Наименование блоков | Функциональное назначение | Аппаратура |
| Блоки обработки данных на ПУ | Вычислительные функции: усреднение, интегрирование, масштабирование, суммирование и т. п. | Программа |
| Логические функции: формирование обобщенных ТС, контроль пределов, сортировка данных | То же | |
| Преобразование код-аналог | ЦАП | |
| Запоминание сигналов | Оперативная память | |
| Оценка состояния | Программа | |
| Блоки входа-выхода на ПУ (сторона диспетчера, оператора) | Преобразование сигналов выхода в информацию, понятную оперативному персоналу, и преобразование действий персонала в сигналы управления Отображение и регистрация данных диалог человек-машина | Диспетчерский щит, дисплей, пульт (консоль) управления, ключи управления (программа) |
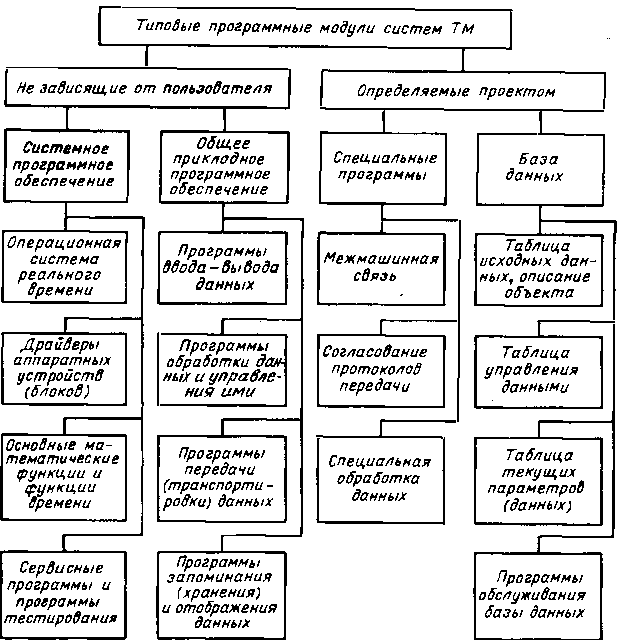
Рис. В.5. Программное обеспечение систем телемеханики
Программное обеспечение систем ТМ может быть подразделено на два типа. Первый тип — основные программы, не зависящие от конкретных условий применения и обеспечивающие выполнение заданного набора функций; они записываются постоянным запоминающим устройством (ПЗУ) и поставляются заводом-изготовителем совместно с аппаратурой ТМ. Второй тип — программы, определяемые конкретными условиями пользователя и зависящие от проектных данных. Эти программы в основном записываются пользователем в оперативное запоминающее устройство (ОЗУ) либо в ПЗУ с помощью специального блока-программатора в составе УТМ.